
新智元报道
新智元报道
【新智元导读】蔚蓝BabyAlpha A3用两件事改写了行业:一套国产芯片异构架构,算力是英伟达旗舰芯片的数倍;一套感知系统,让机器人的眼睛和耳朵第一次真正「够用」。消费级具身智能,正式进入「真智能」时代。
消费级具身智能,已经卡了很久了。
能跑。能跳。能对话。听起来很美好。
但真实家庭里,它认不准人脸,躲不过拖鞋,说一句话要等好几秒——那些发布会上炫酷的 Demo,关上门来用,跟玩具没什么区别。
这个行业真正卡住的地方,有两道槛。
第一道,是算力。一颗芯片要同时扛 AI 推理、实时运动控制、低功耗运行,物理上限来得比预期更快。
不是路线错了,而是这条路的天花板,恰好卡住了具身智能最关键的那道槛。
第二道,是感知。主流方案用的是 200 万像素摄像头,帧率 30fps。
一只猫从「出现」到「消失」只有零点几秒,30fps 可能只拍到一帧模糊的影子,还没来得及处理,猫已经跑了。这不是帧率的差距,是「反应窗口」的差距。
这两道槛相互缠绕,把整个行业锁在「半智能」的天花板下面。直到蔚蓝科技拿出 BabyAlpha A3,给出了一次系统性破局。


过去五年,整个具身智能行业都深陷在一个「算力死胡同」里。
这个死胡同的形成,有其深层的技术根源。
具身智能对算力的需求,本质上是「三重需求的叠加」:AI 大模型的推理计算、运动控制的实时响应、以及设备端的低功耗约束。
这三个需求在物理特性上是相互矛盾的——AI推理需要高功耗的高性能计算,运动控制需要毫秒级的实时响应,消费级产品又必须压低功耗以控制发热和成本。
通用芯片厂商的应对思路是「一颗芯片扛所有」。
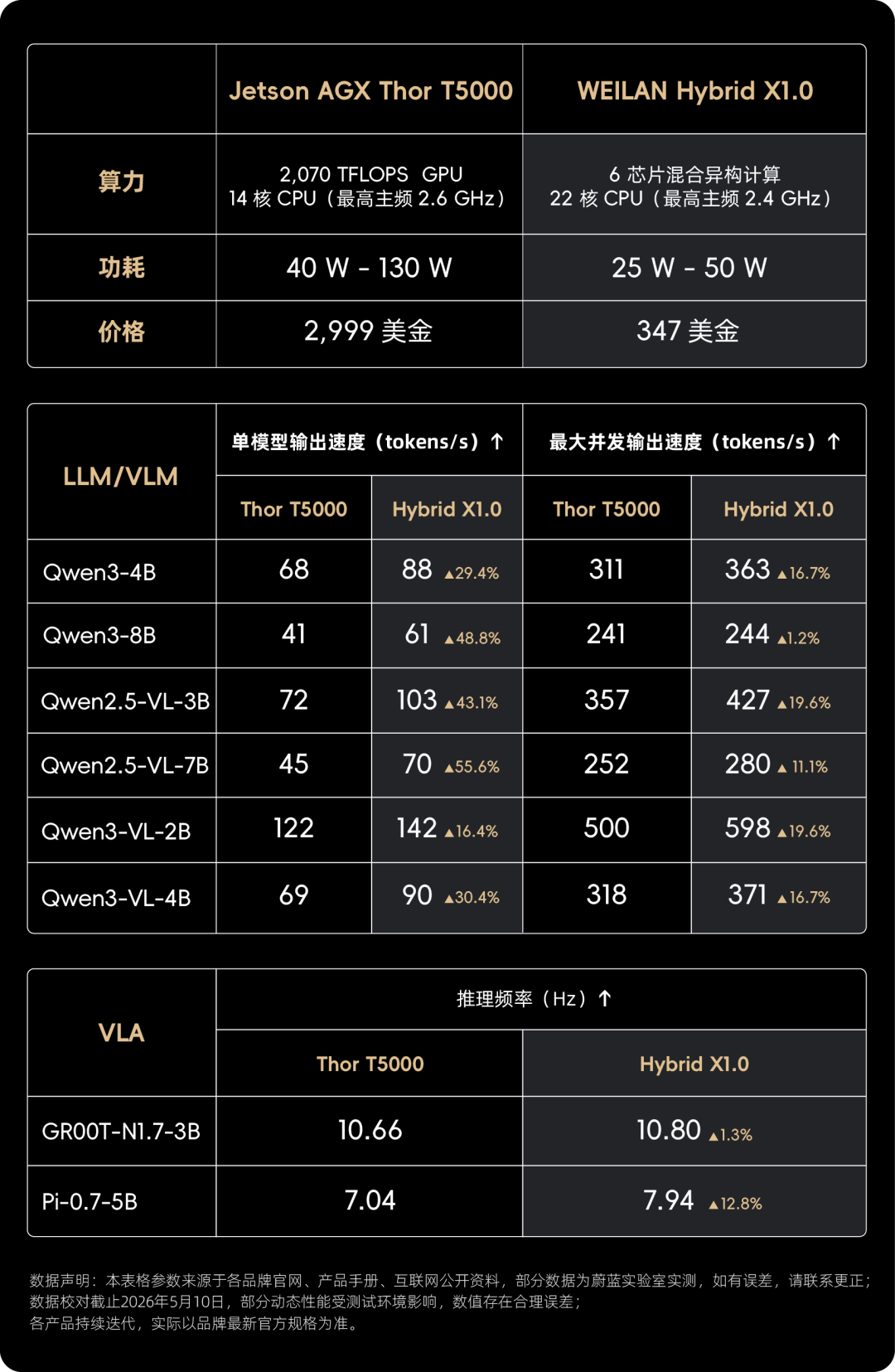
英伟达的 Jetson AGX Thor 就是这个思路下的旗舰产品:尽可能把算力往上堆,用单芯片的峰值性能覆盖所有场景。但这条路很快遇到了三重困境。
第一重困境,是摩尔定律的放缓。
芯片制程从 7nm 到 5nm 到 3nm,每一代晶体管密度提升带来的算力增益正在边际递减。
想靠一颗芯片在三个维度同时突破,物理上越来越难。
第二重困境,是通用芯片的效率浪费。
通用架构追求的是「什么都能做」,代价是「什么都不极致」。
大模型推理、运动控制、传感融合——这三个任务的计算模式完全不同,放在同一颗芯片里协同处理,大量算力消耗在任务切换和数据搬运上,实际能效比远低于理论峰值。
第三重困境,是成本与量产的不可调和。
英伟达旗舰芯片Jetson Thor系列单颗定价 2999 美金,这个成本放到消费级产品里,定价至少要好几万元才能覆盖。
但消费级市场对价格极度敏感,高定价直接压缩了市场体量,进而减少数据积累,形成恶性循环。
整个行业在这堵墙前徘徊了五年,直到蔚蓝拿出了一套完全不同的思路。
蔚蓝的解法,是放弃「单核超人」的幻想,用一套混合异构计算集群,重新定义了具身智能的算力架构。
蔚蓝没有试图在单芯片的框架内优化性能,而是从根本上拆分了问题:AI 推理、运动控制、传感融合——这三个任务,对芯片的需求完全不同,为什么要用同一颗芯片来处理?
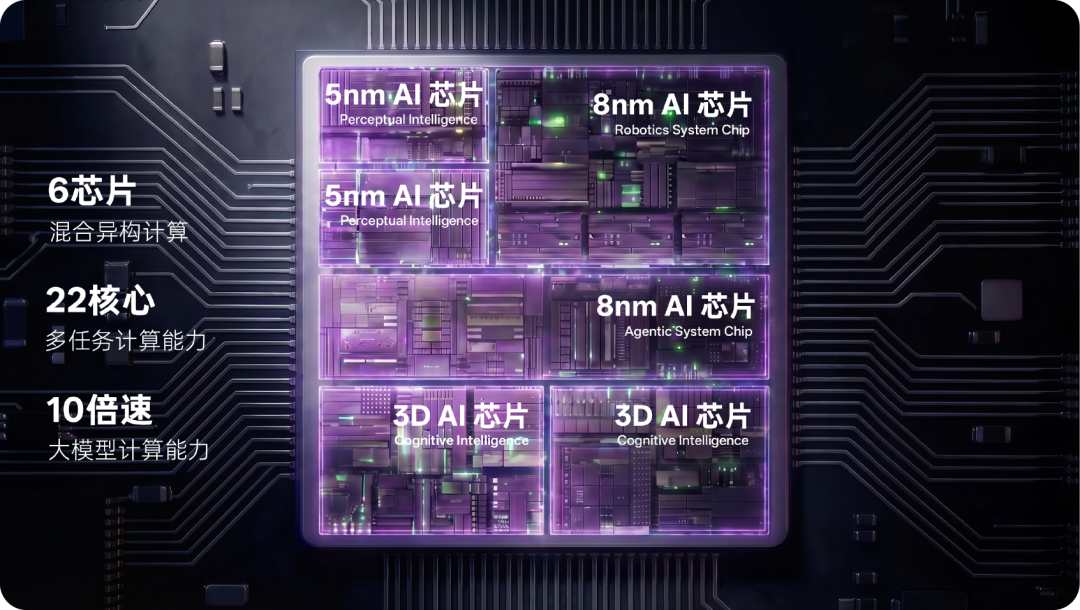
A3 的「大脑」由 6 颗不同制程、不同功能的国产芯片组成,总计 22 核 CPU:2 颗 5nm 芯片负责感知智能,2 颗 8nm 芯片负责机器人系统与自主智能,2 颗 3D 堆叠芯片负责认知智能。
不同芯片处理不同任务,各自跑在最优的能效比上,不再互相抢资源。
这个思路的本质,是用「分而治之」替代「大力出奇迹」。
打个比方:单芯片路线像是一家餐厅让一个厨师同时做前菜、主菜和甜点,每个菜都只能做到 70 分。异构计算则是让专做前菜的厨师做前菜,专做主菜的厨师做主菜——各司其职,整体体验远超单厨师模式。
但难度不在于「拆分」,而在于「协同」。
6 颗芯片同时运行,每颗芯片的时序调度、数据交换、功耗管理都必须精确配合,任何一个环节出现延迟或错位,就会出现「反应卡顿」。
蔚蓝自研的分布式实时计算系统,是这套架构真正的技术壁垒。
这套架构打出了怎样的效果?
测试条件说明: A3 数据为 BabyAlpha A3 实测值;「行业主流」为第三方测评中同规格模型的参考数据(15亿/30亿/70亿 各档位取代表性产品最优成绩),实际因产品而异。
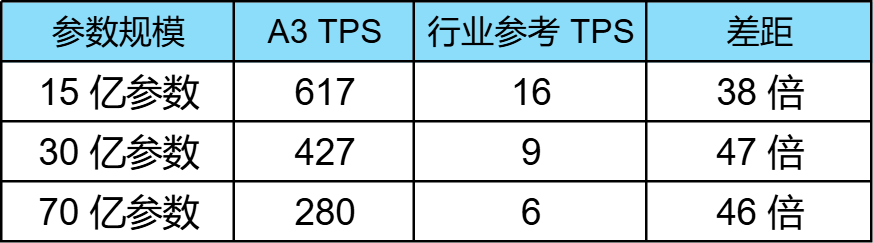
70 亿参数大模型,第一次在消费级设备上实现了流畅的端侧推理。
你说一句话,机器人几乎同时给出回应——这种体验上的差距,不是优化,而是代际鸿沟。
更关键的是成本。
英伟达 Jetson AGX Thor T5000,单颗定价 2999 美金。蔚蓝这套混合异构集群,物料成本仅 300余美金,约为英伟达的十分之一。
这不是价格战的结果,而是架构创新的红利——6颗专用芯片协同,比 1颗通用芯片用更低的成本,做了更多的事。
但成本账还有另一层含义:国产芯片,意味着蔚蓝的发展速度与整个国产芯片产业的进步绑定。每一代国产制程的突破,都能直接转化为A3 性能的新一次跃升。
蔚蓝不需要等英伟达迭代,不需要看供应链的脸色。战略主动权,在自己手里。
这意味着,当行业里其他玩家还在用英伟达芯片规划产品路线图时,蔚蓝的路线图是与国产芯片生态同步演进的。这是一个随时间不断扩大的结构性优势。
有了算力,还需要一双好眼睛。但感知的瓶颈,不只是「分辨率不够」这么简单。
具身智能的核心逻辑是:感知数据是智能的输入原料。
如果输入原料是低质量的——模糊的图像、稀疏的点云、定位不精准的声音——那么再强大的大模型也只能从这些低质量原料里提取有限的特征,输出的智能水平必然存在天花板。
这在技术上叫「Garbage in, garbage out」(垃圾进,垃圾出)。
过去行业里大量关于「大模型不够聪明」的抱怨,本质上有相当一部分应该归咎于感知输入的质量瓶颈。
孩子从客厅跑向厨房,机器人跟在后面。半路从沙发底下窜出一只猫——你看见了,机器人呢?30fps 的摄像头在猫窜出的那一瞬间可能只拍到一帧模糊的影子,200 万像素在逆光下根本无法识别人脸轮廓。
这种「看不见」,不是算法的问题,是感知硬件的问题。
A3 的感知革命,本质上是在解决一个底层矛盾:机器人要理解真实物理世界,首先需要真实物理世界的高质量数据。

视觉系统的参数——6600 万像素三摄(8K + 4K + 4K),是主流的 30 倍;HDR 140 dB;480 fps——在消费级具身智能上同时落地,这是第一次。
想象一下,你家下午三点,阳光斜射进客厅,逆光的窗户和阴影里的人脸,大多数机器人只能看到模糊的轮廓,「过曝」了。
这背后是一个物理极限问题:人眼的动态范围(HDR)大约是 100-120 dB,主流机器人的 HDR 约为 80 dB。在光照剧烈变化的场景里,摄像头要么亮部过曝、要么暗部死黑,而 A3 的 HDR 达到 140 dB,足以应对家庭环境中的复杂光照。
480 fps,意味着同样一个场景,它有 16 帧画面来追踪这只猫的运动轨迹。
它不是在「看到」猫——它是在「看清」猫要往哪个方向跑。这不是实验室里的极限数据,这是真实家庭里的反应能力。

你家客厅在机器人眼里是什么样的?
主流方案每秒只能采集几万点云,构建出的环境地图,类似于用像素模糊的2G 地图导航——能分清大方向,但地毯边缘、拖鞋、充电线,一概看不见。
这些机器人看不见的东西,才是家庭场景里真正的危险。
一个经常被忽视的事实是:家庭场景里的障碍物,其特征尺寸往往远小于室外自动驾驶场景。
一根细细的充电线、一双薄拖鞋的边缘——这些在 2D 地图里无法标注的细节,在稀疏点云里完全缺失。
机器人要安全地在真实家庭里行走,必须「看到」这些小东西。
A3 的答案是:5 组 3D ToF + 3D 结构光,组成 360° 环视面阵,点云密度 223.2 万点/秒,是行业主流的 50 倍。
它知道你的拖鞋在哪、门槛有多高、沙发腿之间的缝隙够不够它钻过去。

大多数机器人的听觉,只能判断「有没有声音」,判断不了「声音从哪来」。
这个问题在家庭场景里尤为突出:孩子在家里喊机器人,机器人如果无法判断声源方向,就只能原地转圈寻找,交互体验大打折扣。
进一步的场景是:孩子从不同房间喊它,它需要知道往哪个方向走。
A3 的答案是:12 麦仿生 3D 环形阵列,声源定位精度 ±3°,而行业主流产品仅为 ±15°,差距超过 5 倍。
这意味着你在客厅一角喊它的名字,它转头准确看向你,而不是茫然地原地转圈。
感知革命的意义,不在于参数本身,而在于它解开了第二道枷锁。
高精度、高维度的感知数据,是大模型真正有效运行的输入前提。没有感知能力,大模型再强也只是「聪明在云端,蠢在本地」。
有了感知和算力,家庭机器人还差最后一道槛——安全。
但安全这个话题,在行业里长期处于一个尴尬的处境:技术发布会上,大家比的是算力、感知、AI 能力;安全往往被归入「基础配置」,不被当作核心卖点来强调。
但对于家庭用户来说,安全是决定「买不买」的第一道门槛——不是加分项,而是否决项。
家庭不是实验室。实验室里机器人出错,大不了重启。家庭里有孩子、有老人、有宠物——出一次事故,信任归零。
七年来,蔚蓝 BabyAlpha 系列进入了 295 个城市的真实家庭,累计运行 9.5 亿分钟,完成 6548 万次人机交互,重大安全事故:零(依据蔚蓝官方安全报告定义)。
这组数字背后,不是实验室跑分,而是真实家庭用户的使用反馈。
突然窜出的猫、地上的拖鞋和线缆、蹒跚学步的小孩——这些场景,实验室模拟不出来。
唯一的方法,是在真实家庭里一台一台跑,跑足够长的时间,积累足够多的 corner case,然后用这些 case 反过来迭代安全设计。
BabyAlpha A3 的安全体系,是用这些经验铸成的:
-
物理安全:防夹手设计、悬崖检测、紧急制动、碰撞缓冲——机器人与人体交互时的安全底线
-
系统安全:芯片级信任根、安全启动、SELinux 强制访问控制——云端与本地双重防护
-
隐私安全:端侧 AI 驻留、全分区加密、TLS/SSL 传输加密——你交给它的是家,它得守住隐私的边界
 |
 |
 |
蔚蓝成立7年积累的know-how,是竞争对手短期无法跨越的护城河。
不是因为这些安全问题本身有多难解决,而是因为解决这些问题需要时间——真实家庭场景下的时间积累,无法被技术突破所替代。
算力、感知、安全,三道槛蔚蓝都跨过去了。但这些能力,不是凭空冒出来的。
蔚蓝科技的创始团队深耕具身智能多年,创始人曾带队在 RoboCup 国际顶级机器人赛事中夺得三连冠。
从那时起,方向就很清晰:做真正的家庭机器人,而不是实验室里的Demo。
这七年的路,走得并不「酷」。
当行业里其他公司在做融资驱动的技术 Demo、在追逐一个又一个热点概念时,蔚蓝在干的事情听起来要枯燥得多:自研运动控制算法、建量产工厂、开品牌体验店、一台一台地把机器人放进真实家庭里跑。
但正是这些「笨功夫」,积累出了真正的壁垒。
-
2019年:开始自研运动控制算法
-
2021年:推出全球首款个人四足机器人,打破MIT 世界纪录
-
2022年:建成国内首个四足机器人量产工厂
-
2023年:推出BabyAlpha 系列,开启消费级市场验证
-
2024年:开出全球首家具身智能品牌体验店
-
2026年:BabyAlpha系列累计销量25,397 台,90%流向真实家庭用户
每一步都在往一个方向积累:真实家庭的使用数据。
当别人用模拟器训练 AI,蔚蓝的用户正在每天产生真实的交互数据;当别人在实验室调试感知算法,蔚蓝的用户已经在295 个城市、无数种家庭环境里帮它测试corner case。
这就是「产品 → 数据 → 智能 → 产品」的进化飞轮。
真实用户越多,数据越丰富,算法越强,产品越好用,更多用户愿意用——这个飞轮一旦转起来,后来者面临的是越来越高的追赶门槛。
时间壁垒的可怕之处在于:它是成倍的。
蔚蓝今天积累的每一个 corner case,都是后来者必须重新踩过的坑。而每踩一个坑都需要时间。更多的机器人在更多的家庭里运行,意味着数据积累的速度本身也在加速。
蔚蓝七年积累的真实家庭数据,是用时间铸成的壁垒。
门槛立起来了,格局重塑在即
A3 之前,行业对「消费级具身智能」的定义是:一台能跑、能对话、但别指望太聪明的机器。
A3 之后,这个定义被改写了。
一台 70 亿参数大模型流畅运行、感知系统关键指标达到人眼水平、具备全天候全自主能力的机器人——
不是实验室里的 Demo,是今年Q3就要推向市场、接受检验的消费级产品。
这道门槛,天花板比预期更远,但起点也比多数人想象的更高。
七年的积累、真实家庭的数据、算法在 corner case 里踩过的每一个坑——这不是一年内可以复制的。
当这道门槛真正立起来,行业格局的重塑已经在加速:具备全栈自研能力的厂商,将进一步扩大领先优势;依赖公版方案的玩家,将面临越来越难以弥合的代际差距。
正如 Christensen 所言:「下一件大事,最初看起来都像个玩具。」
BabyAlpha A3,已经不像个玩具了。
消费级具身智能,正式进入「真智能」时代。
而这一次,定义游戏规则的,是中国公司。

点击阅读原文,了解更多新品信息~